Японцы создали пальцы для робота, которые управляются живыми мускулами
Когда дело касается постройки робота, зачем выдумывать новые искусственные материалы, если природа уже создала все за нас? Японские исследователи разработали новый способ интеграции живой мышечной ткани с роботизированным скелетом и заставили его двигаться предельно реалистично.
Это не первый случай объединения робота с живой тканью. В 2016, исследователи создали «робота-ската», который управлялся сердечной мышцей и реагировал на свет. Сразу после этого научному миру представили «ползающего робота», который был напечатан на трехмерном принтере и приводился в движение мышцами морской улитки.
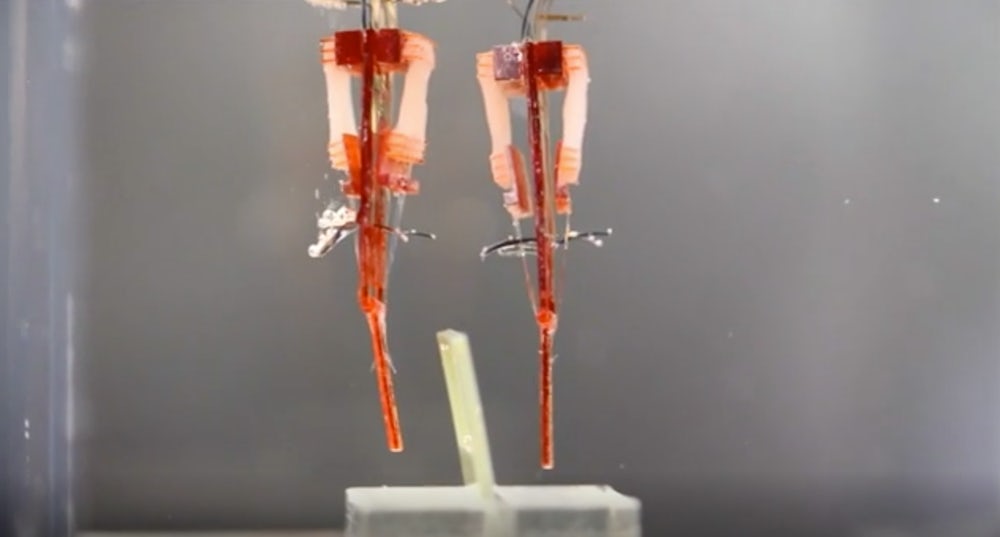
В своем новом исследовании, японские ученые стали наращивать мускулы поверх роботизированного скелета. Они начали с листов гидрогеля, содержащего миобласты, клетки-зародыши мышечной ткани. Эти листы были приложены к определенным местам каркаса и превратились в нормальные мышечные клетки, надежно прикрепленные к скелету.
Чтобы мышцы начали сокращаться, в них поместили электроды, так что палец стал сгибаться в своем единственном суставе. Кроме того, ученые нарастили и вторую мышцу, чтобы мускулы работали в противофазе, как у живых существ. Это позволило реализовать плавное и естественное движение пальцев.
«Наши исследования показали, что антагонистическое расположение мускулов, позволяют реализовать движение, очень похожее на движение человеческого пальца» рассказывает Yuya Morimoto, ведущий исследователь, — «Если мы сможем объединить множество таких мускулов в единое устройство, мы сможем воспроизводить более сложные движения таких частей тела как запястья, руки и т.д.»